未来の詰まった、やわらかロボット

これまでのロボットは、ボディが硬いために環境の変化に適応しにくく、人に危害を及ぼす危険もあった。こうした難点を克服すべく、柔らかい素材を使った「ソフトロボット」の研究が世界中で行われている。多くの日本人研究者が活躍するスイスの大学でも、未来のロボットが研究開発されている。
ロボットは私たちの日常生活にどんどん浸透している。工場では産業用ロボットが車の部品を組み立て、家ではロボットが掃除をし、芝を刈る。子ども部屋では、恐竜や犬の形をしたロボットが子どもの相手をする。
こうしたロボットに共通するのは、ボディが金属や合成樹脂などでできているために硬いことだ。硬ければ頑丈ではあるが、しなやかではない。非常に正確に作業できて疲労することもないが、一定の条件下でなければ機能できない。
国の重点研究分野の一つに、国家主要研究(NFS/PRN)ロボット工学がある。連邦工科大学チューリヒ校およびローザンヌ校、チューリヒ大学、ダレモレ人工知能研究所が国からの支援を受けて様々な観点からロボット研究を行っている。国家主要研究ロボット工学の期間は2010年から2014年までで、予算は約3500万フラン(約37億円)。
国家主要研究ロボット工学には以下の五つのプロジェクトがある:
・バイオミミックセンシング、アクチュエーション、モビリティ(生物を模倣したロボットの研究)
・インタラクションと操作(ロボットと人とのコミュニケーションに関する研究)
・人工関節ロボティクス(人の動きを助けるロボットの研究)
・分散ロボティクス(モジュール型ロボットの研究)
・日常生活のためのロボット(ロボットを社会に広めるための研究)
今年7月には、ティチーノ州モンテヴェリタ(Monte Verità)でソフトロボティクスおよび形態学に関する国際ワークショップが開催された。主催者は、連邦工科大学チューリヒ校(ETHZ)バイオロボティクス研究室の飯田史也室長。スイス、日本、米国を中心とする研究者約100人が参加した。
また、硬いロボットは人間に危害を及ぼす可能性もある。鉄製のロボットアームは周囲に人がいても気づくことができないため、そばに近づいた人に大けがを負わせるかもしれない。医療現場では、ロボットを使った手術もあるが、硬い機械が患者の体を傷つけるのではと危惧する医師も多い。
そこで、環境に順応し、人に危害を加えない柔らかいロボットの研究、いわゆる「ソフトロボティクス」が2000年を境に盛んに行われるようになった。この分野で研究者が注目するのは、生物だ。
「人間も動物も、体はソフト。体のうち90%が柔らかく、硬いのは10%だけです。生物が環境に順応できるのは、生物の体の性質や形自体に何かがあるのではないかと、我々は考えています」と、連邦工科大学チューリヒ校(ETHZ)バイオロボティクス研究室の飯田史也室長(39)は説明する。
柔らかいロボットの研究はまだまだ始まったばかりだ。「硬いロボットは体がソフトになったとき、体の制御など基本的なことができなくなってしまう。そこで、ソフトロボティクスでは素材、センサー、モーターなどを一から開発する必要が出てきます」。そのため、この研究にはロボット工学だけでなく、材質学、化学、生物学など様々な分野の専門家が携わっている。
柔らかいロボットハンドに人工筋肉
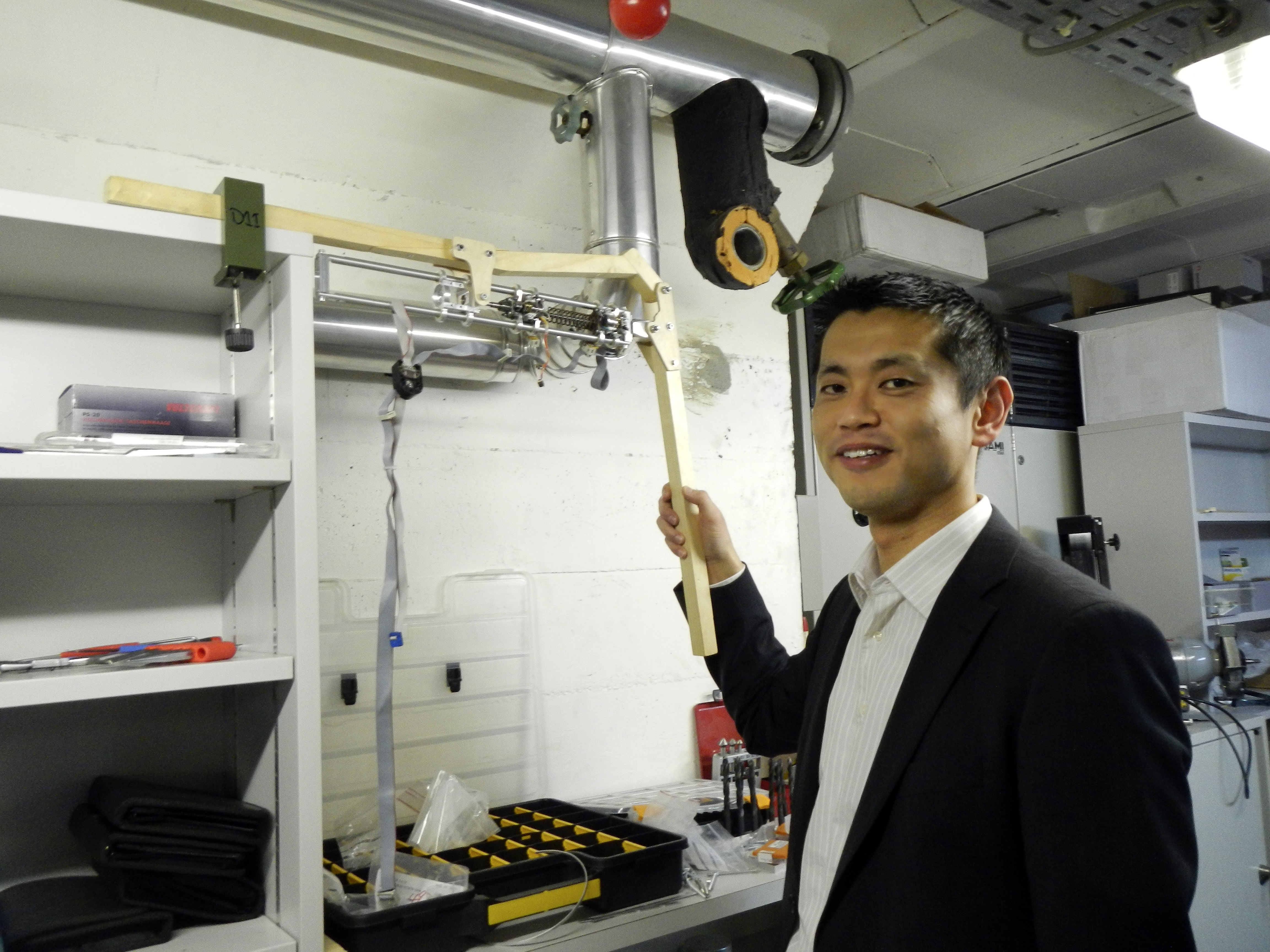
ソフトロボティクス研究者の一人が、連邦工科大学ローザンヌ校(EPFL)知能システム研究室(LIS)および宇宙マイクロシステム研究室(LMTS)の博士課程に在籍中の新竹純さん(28)だ。新竹さんは、「誘電エラストマーアクチュエータ(DEA)」と呼ばれる、一種の人工筋肉の研究に取り組んでいる。
難しい名前だが、見た目はいたってシンプルなシート。親指ほどの大きさで、透明で柔らかい。シートの真ん中には電気を通すナノ粒子でできた黒い長方形がある。ここに電圧を与えたり止めたりすることで、生物が動くようにシート全体が曲がったり平らになったりする。
ロボットの上に腰かけても、あまりくつろげないと考える人は多いだろう。しかし、ふかふかのソファが食事の際に硬いテーブルに変化するようなロボットが将来、登場するかもしれない。連邦工科大学ローザンヌ校(EPFL)バイオロボティクス研究所では、そんな夢のようなモジュール型ロボット「ルームボット」の研究開発が行われている。
ルームボットは、ハンドボールぐらいの大きさの丸いモジュール(交換可能な構成要素)からできており、モジュールを複数組み合わせることで様々な形や大きさに変えることができる。個々のモジュールにはモーター、バッテリー、電子制御回路が内蔵されている。
モジュールの数が増えるにつれ、ルームボットの形は複雑になり、操作も難しくなる。「個々のモジュールはラジコンカーのように簡単に操作できる。しかし、使用されるモジュールが増えると、ルームボットの動きが予想できなくなる。そのため、多くの可能性を試して、最適化しなくてはならない」と、研究員のマッシモ・ヴェスピニャーニさんは説明する。
今の時点では、ルームボットはそのほとんどが硬いプラスチックでできているが、ソファとしても使えるようにするには、柔らかいカバーも必要だ。そのため、ヴェスピニャーニさんら研究チームは、カバーとしての最適な素材の開発も今後視野に入れていくという。
このシートを複数組み合わせれば、物をそっとつかめるロボットハンドに使うこともできるという。「こうした新しいものは、使い道を考えることが大変」と打ち明ける新竹さんだが、この技術は惑星探査や人の動きを助けるデバイスに応用できるのではないかと、アイデアを膨らませている。
ソフトロボティクスの研究者が抱える課題は、新素材や部品の開発に限らない。硬いロボットの場合、ボディ本体の大きさや関節の角度が正確に把握できるため、動きを前もって計算し、ロボットを操作することは比較的容易だ。しかし、ボディが柔らかく、しかも伸びるようなロボットではそうはいかない。
この問題には、「ルームボット(Roombots)」の開発者たちが取り組んでいる。EPFLバイオロボティクス研究所で開発されているこのロボットは、前もって決められたボディの形はなく、小さな丸いモジュール(交換可能な構成要素)を組み合わせて、自由自在に形を変えられる。「命令をしたら、イスからソファに変形できるような、家具として使えるロボットを開発することが夢だ」と、研究員のマッシモ・ヴェスピニャーニさん(29)は語る。
タコの足に知能
多くの生物は非常に柔らかい体でできているにもかかわらず、体をうまくコントロールできている。その中でもとりわけ柔らかく器用なのが、タコだ。欧州連合(EU)研究プロジェクト「オクトパスIP」では、そんなタコの能力を解明しようと、様々な国の研究者たちが今後数年をかけて、自然界のタコと同様の能力を持つタコ型ロボットの共同開発に取り組んでいる。
連邦工科大学チューリヒ校でポストドクターをしている中嶋浩平さん(33)は、同研究プロジェクトに関わった研究者の一人。小さな水槽の中には、シリコン製の1本のタコの足がゆらゆらと揺れている。このロボットには多数のセンサーが備え付けられており、足のどの部分がどのポジションにあるのかを刻々と検知する。中嶋さんはこのロボットを使い、タコの足には何らかの知能があり、動きを短時間記憶することを証明した。
例えば何かに衝突したり、水流に巻き込まれたりして、タコの足の一部に障害が発生したとする。すると、その障害は時間差で体全体に伝わっていく。「硬いものとは違い、柔らかいものは一部を動かせば他の部分もそれにつられて動きます。つまり、動くと身体の情報が生まれる。タコは、動くだけでたくさんの情報を生み出し、それを生かして体をコントロールしたり、次の動きを作ったりします。こうした身体の情報を抽出して数値化すれば、ソフトボディの制御に応用できるのです」
中嶋さんの夢は、映画「ターミネーター2」に登場する悪役ロボットのような、液体にも変化できるロボットを開発することだ。映画の中のロボットは凶暴だが、「あんなに強くなくていいんですよ。ただ、ぐにゃーっと伸びたりできたら面白いんじゃないかと思います」と笑った。

JTI基準に準拠


swissinfo.chの記者との意見交換は、こちらからアクセスしてください。
他のトピックを議論したい、あるいは記事の誤記に関しては、japanese@swissinfo.ch までご連絡ください。