“عملُنا ألهم رحلة إنجنويتي على المريخ”
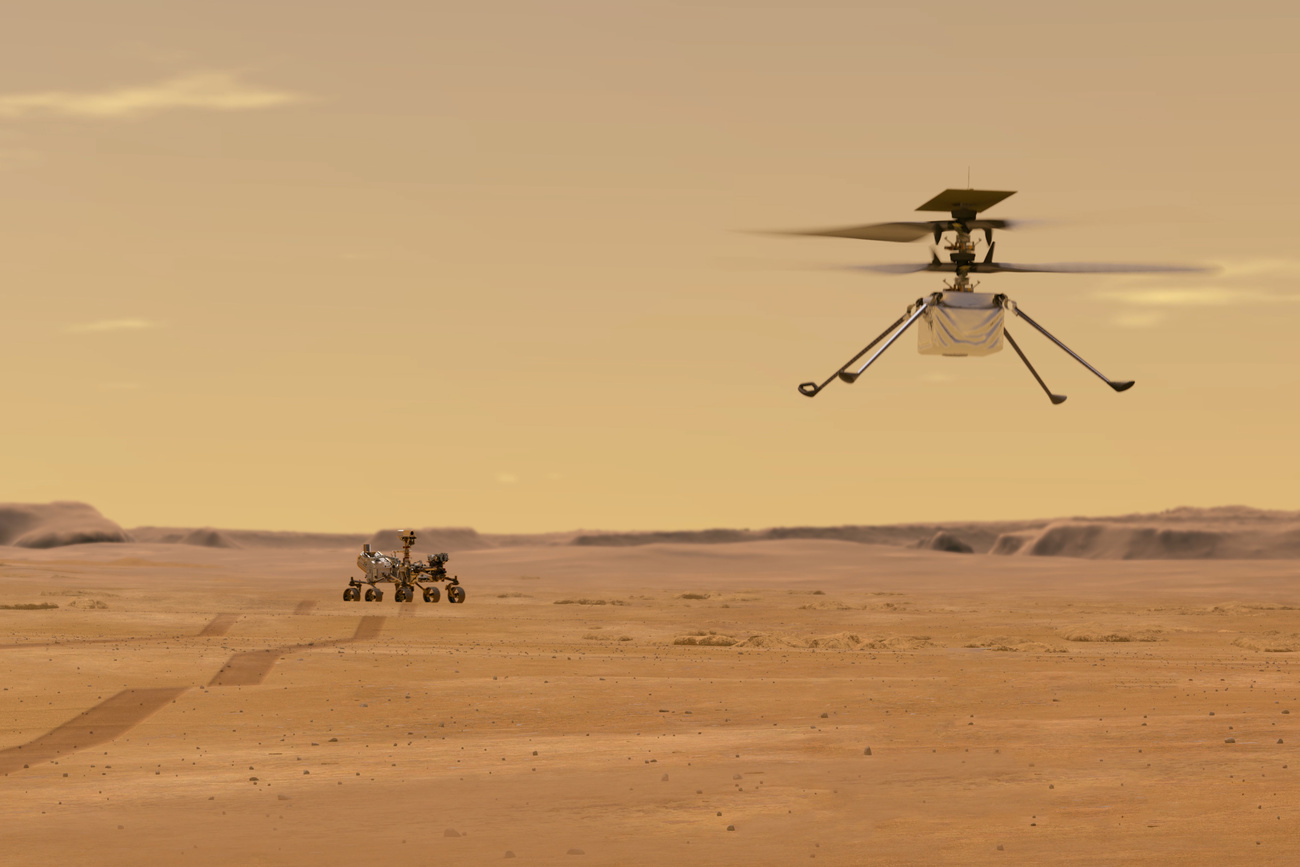
كانت الأبحاث السويسرية مصدر إلهام لتصميم الطائرات ذاتية التحكم على أثر تحليق مروحية "إنجنويتي" Ingenuity المسيرة فوق سطح المريخ يوم 19 أبريل 2021.

يصف دافيدي سكاراموتزا، الذي يقود مجموعة الروبوتيات والإدراك في جامعة زيورخ، الرحلة بأنها “إنجاز كبير” ويقول إن الخطوة التالية للطائرات المريخية هي استكشاف الأماكن التي قد توجد فيها مقومات الحياة ويمكن لها حتى أن تؤوي البشر الذين قد يسافرون إلى هناك يوماً ما.
في الآونة الأخيرة، اتجهت كل الأنظار إلى “مسبار المثابرة” في مهمته التابعة لوكالة الفضاء الأمريكية “ناسا” إلى المريخ وإلى مروحية “إنجنويتي” وهي طائرة بدون طيار ذاتية التحكم، التي أكملت مؤخراً أول رحلة لها، خارج الغلاف الجوي للأرض.
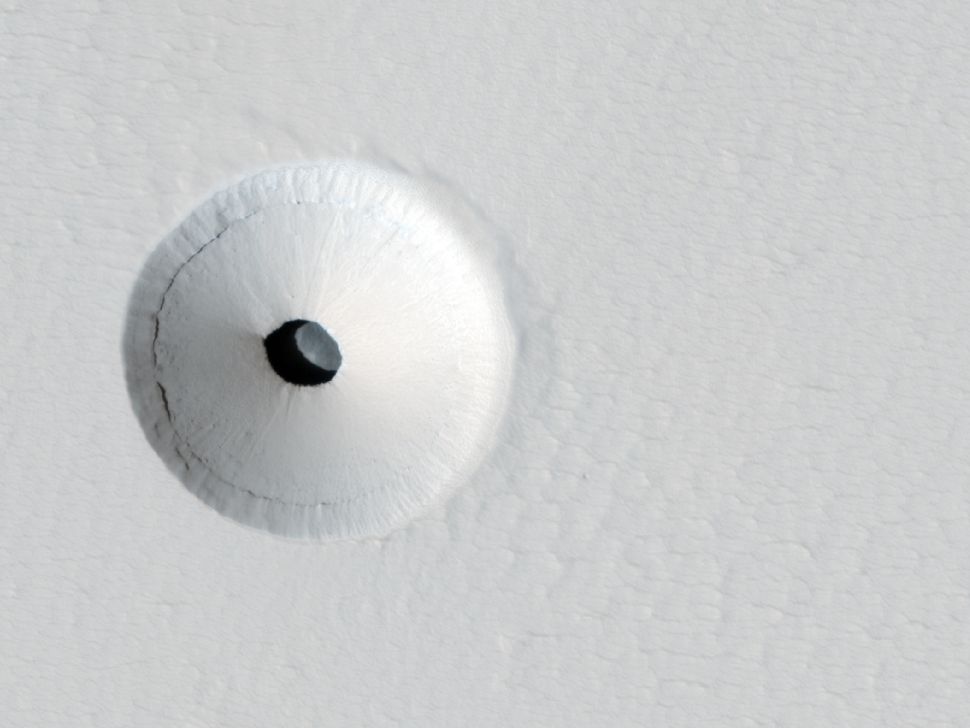
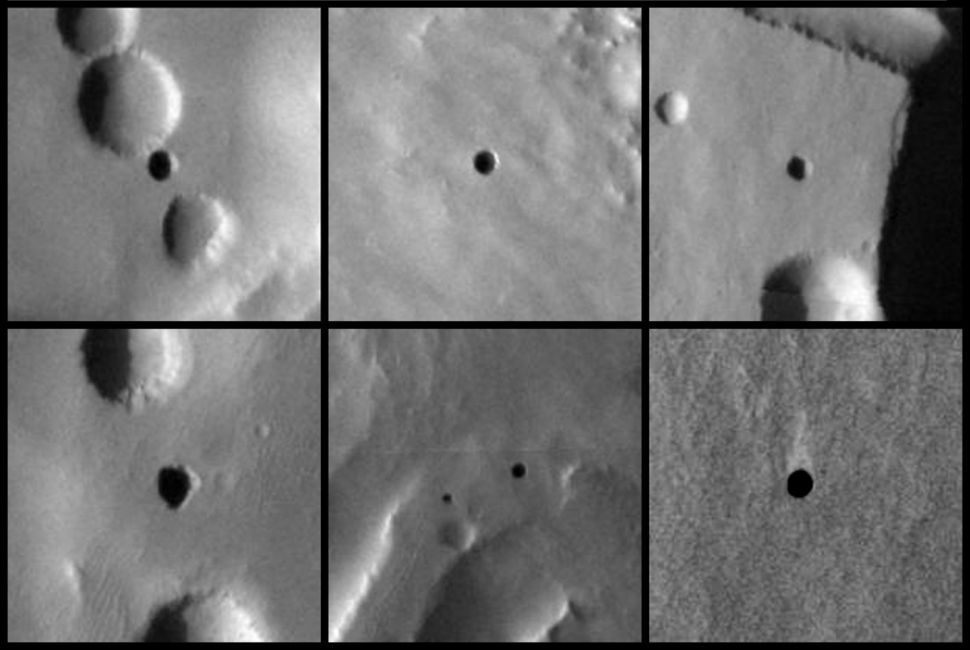
هذه المهمة كانت ضرورية للبحث عن وجود علامات للحياة الميكروبية القديمة على الكوكب الأحمر. كما يُمكن لهذا الدرون أيضاً أن يعزز الاستكشاف بشكل كبير من خلال الغوص في تجاويف عميقة مثل أنابيب الحمم البركانية التي يُمكن أن تكون صالحة للسكن.
منذ عام 2009، يعمل دافيدي سكاراموتزارابط خارجي على تقنية الطائرات المسيرة (درونات) المُجهّزة بالكاميرات والتي تعمل دون استخدام نظام تحديد المواقع العالمي (جي بي اس) – مثل المركبة المستخدمة على سطح المريخ – ويتعاون مختبره حالياً مع وكالة ناسا في مهام المروحيات المستقبلية إلى المريخ. ويتحدث إلى SWI swissinfo.ch حول ما قد تزودنا به الطائرات f¨,k àdhv ذاتية التحكم هذه من معلومات عن الكوكب الأحمر، وإمكانية استكشاف أنابيب الحمم البركانية.
SWI swissinfo.ch : كيف سارت رحلة “إنجنويتي” إلى المريخ؟ ماذا يعني ذلك من وجهة نظر علمية؟
دافيدي سكاراموتزا: لقد كان إنجازاً كبيراً. وهو إنجاز يثبت قيامنا بأول رحلة ذاتية التحكم تعمل بالطاقة على كوكب آخر. هذا أمر رائع لأن الغلاف الجوي للمريخ يمثل 1% من حجم الغلاف الجوي على الأرض من موقع ارتفاعاتنا. لإعطائك فكرة واضحة عن معنى ذلك، يكفي أن تعلم أن الطيران على سطح المريخ يُشبه الطيران لمسافة 30 كيلومتراً فوق سطح الأرض!
إنها أيضاً رحلة ذاتية القيادة ومستقلة جزئياً – يقوم جهاز مراقبة العمليات بإرسال المسار الذي تنفذه المروحية بعد ذلك. وهذا أيضاً أمر رائع، بالنظر إلى أن 99% من المروحيات المسيرة (الدرون) التي تُستخدم للأهداف التجارية، لا تزال تعمل بالاعتماد على نظام تحديد المواقع العالمي (جي بي اس). ويدل هذا على أن تقنية الملاحة ذاتية التحكم والقائمة على الكاميرا، والتي كنت أعمل عليها منذ عام 2004، قد أثبتت فعاليتها!
في نقطة التحول هذه للتكنولوجيا، ما الذي يتضمنه عملك على المروحيات ذاتية التحكم في مهام الفضاء؟
الهدف الرئيسي لمختبري هو جعل أداء المروحيات ذاتية التحكم أفضل من أداء الطيارين البشر. لقد قمتُ بتطوير خوارزميات لجعل المروحيات ذاتية التحكم قادرة على أداء مهام معقدة، مثل استكشاف ورسم خرائط بيئات غير معروفة في مهام البحث والإنقاذ (انظر فيديو 1رابط خارجي) بالإضافة إلى تفوق أدائها على أداء الطيارين البشر (انظر فيديو 2رابط خارجي وفيديو 3رابط خارجي). هذه هي التقنيات التي تلعب اليوم دوراً فعّالاً في مهام البحث والإنقاذ، وتفتيش البنية التحتية المعقدة وتسليم البضائع، والتي سيكون لها دورها الكبير في مهمات الفضاء المستقبلية حيث يُمكن لمروحية مسيّرة عن بعد (الدرون) الدخول واستكشاف ورسم خرائط لأنابيب الحمم البركانية على الكواكب الأخرى.
هل يمكنك الإفصاح لنا عن بعض التفاصيل حول تعاون مختبرك مع وكالة الفضاء الأمريكية “ناسا”؟
كل ما نقوم به في مختبري يتعلق بإنشاء نظام ملاحة مستقل، أي ذاتي التحكم للمروحيات المسيرة (الدرون)، باستخدام الكاميرات الموجودة على متن هذه المروحيات فقط. الكاميرات رخيصة الثمن وخفيفة الوزن، وهي مثالية للدرونات. نحن نتعاون حالياً مع مختبر الدفع النفاث التابع لوكالة ناسا للتحقق من مدى ملاءمة كاميرات الأحداث (*) للمهام المروحية المستقبلية إلى المريخ. تُعتبر كاميرات الأحداث نوعاً جديداً من الكاميرات، وهي ذات نطاق ديناميكي عالٍ ودقة زمنية أعلى واستهلاك أقل للطاقة من الكاميرات القياسية. وبفضل هذه المزايا، يعوّل على كاميرات الأحداث بتوسيع القدرات التشغيلية للمهام المروحية المستقبلية إلى المريخ.
(*) كاميرات الأحداث عبارة عن أجهزة استشعار مُستوحاة بيولوجياً لرؤية الأشياء ” الأحداث”، من خلال الاستجابة للتغيرات المحلية في سطوع هذه الأشياء وبريقها.
كيف يمكن أن يُسهم استخدام المروحيات المسيرة (درونات) في البحث عن الحياة على المريخ، وما أهمية أنابيب الحمم بالنسبة لهذا البحث؟ ما الذي يُمكن أن تفعله الدرونات ولا تستطيع المركبات الجوالة القيام به؟
يمكن للدرونات أن تقطع مسافة أطول في وقت أقل بكثير من المركبة الجوالة. وفي المستقبل، سيتم استخدام أسراب من الدرونات لتحديد البيئات المناسبة لاستقبال البعثات البشرية وكذلك الكائنات الحية الدقيقة. ووفقاً للدراسات الحديثة، قد تختبئ الحياة على المريخ في الجليد داخل أنابيب الحمم البركانية التي تشكلت من خلال النشاطات البركانية. الدرونات هي الوسيلة المثالية للدخول إلى أنابيب الحمم البركانية واستكشافها في بعثات المريخ المستقبلية، ويمكن لكاميرات الأحداث أن تلعب دوراً مهماً في هذا المجال لثلاثة أسباب: أولاً، لتمتعها بنطاق ديناميكي عالٍ يجعل من الممكن تحليل نقاط دخول أنبوب الحمم البركانية أثناء التحليق فوقها ؛ وثانياً لأن انخفاض استهلاكها للطاقة قد يؤدي إلى زيادة قدرتها على تحمل التحليق لفترات أطول؛ وثالثاً لأن دقتها الزمنية العالية تقلل من ضبابية الحركة إلى حد كبير أثناء الحركة السريعة، مما يعني أن الدرون لا يحتاج إلى التباطؤ في الظلام.
أنابيب الحمم هي أيضاً البيئات المثالية لاستضافة الحياة البشرية (يمكن أن تحمي البشر من الإشعاع الكوني، وتراكم الغبار، وتقلبات درجات الحرارة، والنيازك الدقيقة)، والدرونات هي بمثابة الروبوت المثالي لاستكشافها لأن بعض أنابيب الحمم قد تكون عميقة وصعبة ومن المستحيل تسلّقها حتى من قِبَل المركبات الجوالة عالية الجودة.
ما هو دور مجموعتك في جعل رحلة “إنجينويتي” ممكنة؟
في عام 2009، عندما كنت لا أزال باحثاً في مرحلة ما بعد الدكتوراه في مختبر الأنظمة الذاتية التابع للمعهد التقني الفدرالي العالي بزيورخ، قمت أنا وفريقي بعرض أول رحلة لطائرة ذاتية التحكم، في الإقلاع والملاحة من نقطة “أ” إلى نقطة “ب”، ومن ثم الهبوط. كانت تلك الطائرة عبارة عن درون صغير مزود بكاميرا وجهاز استشعار بالقصور الذاتي (أي بدون جي بي اس).
كان هذا العملرابط خارجي أول عرض توضيحي لدرون يتحرك بشكل مستقل باستخدام الكاميرا – جميع الأنظمة حتى ذلك الحين و99 % من الدرونات الحالية لا تزال قائمة على استخدام النظام العالمي لتحديد المواقع (جي بي اس).
وبالطبع لا يوجد نظام تحديد المواقع العالمي (جي بي اس) على كوكب المريخ. إن خوارزمية “إنجنويتي” مستوحاة من هذا العمل من حيث أنه يستخدم أيضاً كاميرا واحدة وجهاز استشعار بالقصور الذاتي. علاوة على ذلك، قام الدرون “إنجينويتي” في أول رحلة له بتكرار ما أظهرناه بالضبط في التجربة الأولى في عام 2009 والمذكورة أعلاه: الإقلاع، التحليق، الهبوط.

كيف يمكن للمروحية المُسيّرة (درون) أن يجد طريقه ويحدد اتجاهاته وهو على بعد ملايين الأميال من الأرض؟ ما هي أكبر العقبات التقنية التي واجهتكم أثناء العمل؟
هناك سهولة إلى حد ما في توجيه المسبار (مثل مسبار المثابرة Perseverance) من الأرض مقارنة بالدرون (على الرغم من التأخير لعدة دقائق في الاتصال) لأن عجلاته على تماس دائم باليابسة بينما “ينتظر” الروبوت تلقي الأوامر، الأمر تلو الآخر من الأرض.
أما الدرون (مثل درون “إنجنويتي”) فيصعب التحكم به بسبب حساسيته العالية للاضطرابات الجوية، مما يتطلب تكرار إرسال أوامر التحكم مرات عديدة قد تصل إلى عشرات المرات في الثانية. ولا يتم إرسال هذه الأوامر من الأرض ولكن مباشرة عن طريق “الطيار الآلي” على متن الدرون، أو عبر برنامج توجيه الدرون.
ويعمل الطيار الآلي على مرحلتين: أولاً، يقوم بدمج المعلومات من المستشعرات الموجودة على متن الدرون (وحدة قياس بالقصور الذاتي، ومقياس الارتفاع، وكاميرا موجهة للأسفل) لتقدير موقعه ثلاثي الأبعاد ووجهته بالنسبة إلى نقطة انطلاقه. بعد ذلك، يقوم الطيار الآلي باستخدام الموقع والوجهة اللذين جرى تقديرهما من أجل اتباع مسار محسوب مسبقاً.
هذا المسار المحسوب مسبقاً هو الجزء الوحيد من المعلومات المرسلة من الأرض بواسطة مهندسي وكالة الفضاء الأمريكية “ناسا”. وهو يتألف من سلسلة من نقاط الطريق التي يُحدّد فيها الموقع والوجهة والسرعة التي يجب أن يصل الدرون إليها.
وكمثال على المسار المحسوب مسبقاً: الإقلاع والوصول إلى ارتفاع متر واحد؛ الطيران بشكل مستقيم وأفقياً لمسافة ثلاثة أمتار بسرعة ثابتة تبلغ متراً واحداً في الثانية، ومن ثم القيام بعملية الهبوط.
كانت رحلة الدرون “إنجنويتي” بمثابة عرض تقني، يتمثّل هدفه الوحيد في إظهار إمكانيتنا في القيام بعملية تحليق الدرون على مسار قصير في الغلاف الجوي الرقيق للمرّيخ.
في المستقبل، يجب أن تكون الدرونات الأكثر تطوّراً قادرة على تنفيذ أوامر عالية الدقة، مثل “اذهب لالتقاط صورة لتلك الصخرة”، و “قم بالدخول إلى أنبوب الحمم هذا، ثم قم بإنشاء خريطة ثلاثية الأبعاد له، ثم عد الى القاعدة”.
ولكن، هذه القدرات وإن كانت عالية المستوى، فهي لا تزال محصورة بشكل عام في مختبرات الأبحاث وليست متينة بالقدر الكافي ليتم استخدامها على كوكب الأرض. لذلك نحن بحاجة إلى مزيد من الوقت، ربما بضع سنوات أخرى حتى تصبح رؤيتنا واقعاً حقيقياً.

المزيد
نحو 90 ألف شخص يغادرون سويسرا كل عام: من هم ولماذا يرحلون؟

المزيد
عيادات إطالة العمر: بدعة حديثة أم سرُّ الشيخوخة المفعمة بالصحة؟

المزيد
صحيفة سويسرية:لهذه الأسباب تم حظر جماعة الإخوان المسلمين في الأردن

المزيد
هكذا تُتخذ القرارات في الغرف المغلقة للحكومة الفدرالية

المزيد
صحيفة سويسرية: رامي مخلوف يعود من بوابة الطائفة إلى واجهة المشهد السوري




متوافق مع معايير الصحافة الموثوقة
المزيد: SWI swissinfo.ch تحصل على الاعتماد من طرف "مبادرة الثقة في الصحافة"




يمكنك العثور على نظرة عامة على المناقشات الجارية مع صحفيينا هنا . ارجو أن تنضم الينا!
إذا كنت ترغب في بدء محادثة حول موضوع أثير في هذه المقالة أو تريد الإبلاغ عن أخطاء واقعية ، راسلنا عبر البريد الإلكتروني على arabic@swissinfo.ch.