





























Deft robot fingers give new hope for prosthetics
Swiss researchers have developed a novel robotic system for gripping and lifting objects that mimics the delicate action of human hand muscles to an unprecedented degree.
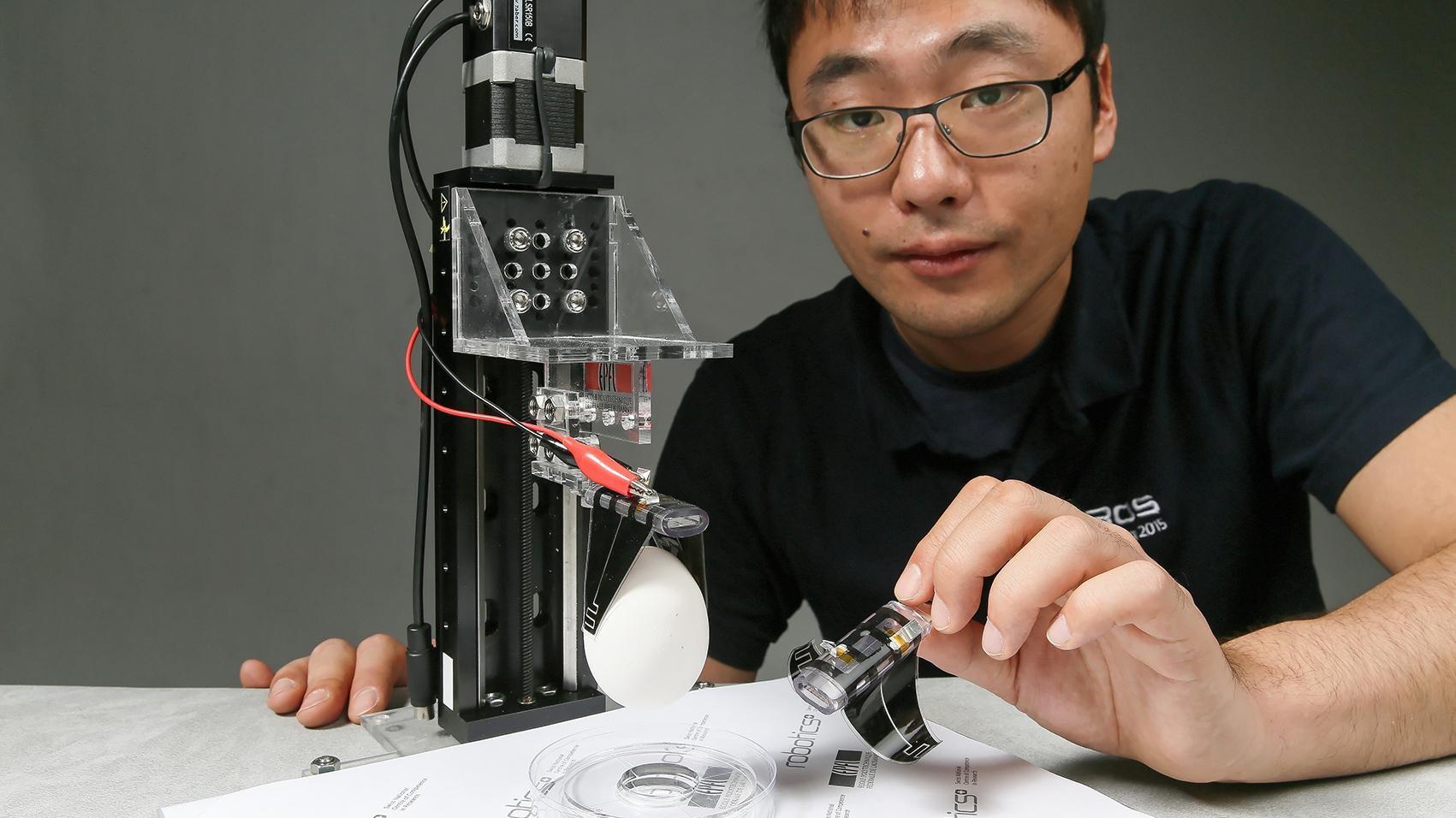
With its nimble fingers and opposable thumb, the dexterity of the human hand is exceptional in nature – and remarkably difficult to replicate. But researchers at the Swiss Federal Institute of Technology Lausanne (EPFL) have developed a robotic gripper that imitates the human hand’s unique combination of precision and strength.
Instead of skin and muscle, the robotic appendage – which can easily pick up a wide variety of objects of up to 80 times its own weight – relies on electrostatic adhesion. This is the same clinging effect that is seen when you rub a balloon onto your hair and then stick it to a wall.
The research, funded by the Swiss National Science Foundation programme NCCR Robotics, has been published in the journal Advanced Materials.
“This is the first time that electroadhesion and soft robotics have been combined together to grasp objects,” says Jun Shintake, an EPFL doctoral student and first author of the publication.
Unlike previous attempts, this robotic device does not need information about the shape and size of an object before attempting to pick it up. A current running through electrodes on two finger-like flaps causes the device’s gripper to bend toward an object – like an egg or a sheet of paper – and conform to its shape.
External Content
Better prosthetics
The researchers say the innovation could be used in food handling, or the retrieval of space debris. But one of the most promising areas of application for this technology is prosthetics.
During a session on artificial intelligence at the January 2016 World Economic ForumExternal link (WEF) in Davos, Andrew Moore of the Carnegie Mellon School of Computer Sciences remarked that the seemingly simple task of picking up objects effectively is still a major limitation in robotics today.
“Many people in the robotics world now are working on the simplest question of reliably picking up a drink,” he said. “Once we have that, there is the prospect that millions, maybe tens of millions of people around the world with impairments that are damaging their everyday life can actually have a robot arm or other [devices] on their wheelchairs, or even eventually on exoskeletons.”
As swissinfo.ch recently reported in a story about the Red Cross Enable Makeathon programme to raise money for prosthetics innovations through crowdsourcing, disabled individuals in rural areas face particular challenges, which technologies like the EPFL’s could help address.

In compliance with the JTI standards
More: SWI swissinfo.ch certified by the Journalism Trust Initiative
You can find an overview of ongoing debates with our journalists here . Please join us!
If you want to start a conversation about a topic raised in this article or want to report factual errors, email us at english@swissinfo.ch.